A vehicle that has always fascinated me is the Lunar Rover Vehicle (LRV) also known as the ‘Moon Buggy.’ Whenever I look up at the moon, just as our ancestors did hundreds of years ago, it always fills me with wonder and amazement. When you look closer at the moon, perhaps through binoculars or a telescope, you remember something very important – not only did humans go there, they drove over it too.
The love of the motorcar is so strong in humans that they just had to take their four wheeled friend with them to the surface of the moon which makes sense if you think about it, as they were able to explore more of the lunar surface and bring back more rock samples with a car than they could on foot.
The LRV was an electric vehicle designed by Boeing and powered by four 200-watt motors, one on each wheel, making it four-wheel drive with four-wheel steering. Two 36-Volt silver zinc potassium hydroxide non-rechargeable batteries were used to power the drive and the steering motors and also a 36-Volt utility outlet which was mounted on the front of the LRV to power the communications relay or the TV camera.
See Pictures and the feature here…

The Rover had to be foldable to transport it to the moon and it was especially compact when folded occupying a space of just 5 ft by 1.8 ft. When unfolded it had a wheelbase of 2.3 metres and a frame length of 3.1 metres with a maximum height of 1.14 meters. It weighed 210 kg on earth, less than half the weight of a modern F1 car thanks to its super light aluminium alloy tubed frame. On the moon it weighed just 34 kilos thanks to the moon’s one-sixth gravity. The Rover was designed to hold a payload of an additional 490 kg on the lunar surface meaning it was strong enough to carry twice its own weight. It could carry two astronauts and their equipment and travel at about 7.5 mph for 40 miles.

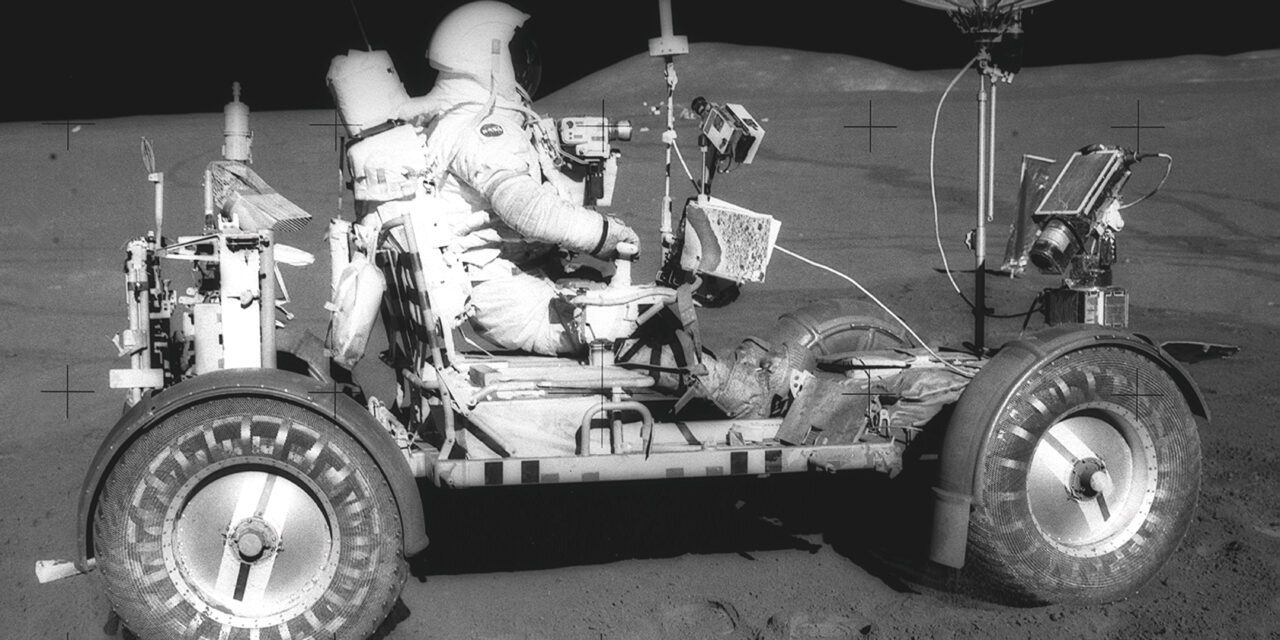
LRV #2 CONTROL AND DISPLAY CONSOLE.




In total four LRV’s were built (costing 38 million dollars) and three Rovers were taken and driven on the moon. One for each of the following missions: Apollo 15 (1971), Apollo 16 and Apollo 17 (1972) and driven by six astronauts. The fourth LRV was used for spare parts. The vehicles were driven an average distance of 30 kilometres (approximately 18 miles) for each of the three missions without any major incident and all three vehicles are still there sitting quietly on the surface of the moon.
To keep the weight to a minimum, the Rover had to go without the creature comforts we have in our ‘earth cars’ keeping the vehicle highly functional. It had two side-by-side foldable seats made of tubular aluminium with nylon webbing and aluminium floor panels. An armrest was mounted between the seats, and each seat had adjustable footrests and Velcro seatbelts. A large mesh dish antenna was mounted on a mast on the front centre of the Rover. The suspension consisted of a double horizontal wishbone with upper and lower torsion bars and a damper unit between the chassis and upper wishbone. Fully loaded the LRV had a ground clearance of 36 cm.
Instead of a steering wheel, the Rover had a T-shaped hand controller situated between the two seats which controlled the four drive motors, two steering motors and brakes. Moving the stick forward moved the LRV forward, left and right turned the vehicle left or right, pulling backwards activated the brakes. Activating a switch on the handle before pulling back would put the LRV into reverse. Pulling the handle all the way back activated a parking brake; simple but effective!
The control and display modules were situated in front of the handle and gave information on the speed, heading, pitch, power and temperature levels. Just as we have sat-nav in our cars, the navigation system on the Lunar Rover was based on continuously recording direction and distance through use of a directional gyro and odometer. This data was inputting to a computer which would keep track of the overall direction and distance back to the Lunar Module. There was also a ‘Sun-shadow’ device which could give a manual heading based on the direction of the Sun, using the fact that the Sun moved very slowly in the sky. If all these systems failed, all the astronauts had to do was to turn around and follow their own ‘tyre’ tracks back to the Lunar Module. As there is no wind or rain on the Moon – those tyre tracks made by hand-woven galvanised steel mesh ‘tyres’ are still there today! For safety reasons the distance the LRV could travel was restricted to a ‘walkback limit’ – the distance in which astronauts could return to the Lunar Module on foot in the event of a breakdown.
During the Apollo 16 mission, astronauts Duke and Young exploded the Descartes Mountains for three days bringing back the largest lunar sample and they also established the moon speed record of 10.56 mph. Handling in one-sixth gravity was challenging and quite possibly fun at times; Charles Duke reported doing a 180˚ spin!
Can you imagine the excitement and thrill the astronauts would have experienced driving on the Moon, seeing moon dust being kicked up by the wheels and covering the fenders? I would have loved to experience what it was like. So next time you see the Moon, just remember there are three very special cars up there!
Fun fact No 1:
During Apollo 15, the crews first test drive was shaky; the front wheel drive wasn’t working so astronaut David Scott had to manage with just the rear wheel drive system. However, the LRV still managed to cope and transport the astronauts as they searched for ‘anorthosites’ which are believe to be the moons oldest rocks!
Fun fact No 2:
During Apollo 17, Gene Cernan’s hammer from one of his suit pockets had caught the edge of the rear-right wheel fender extension causing it to snap clean off causing a massive dust hazard. Cernan carried out a temporary repair using duct tape.
For an alternative view on the moon landings…










{kind=link}